Abstract
Warehouse robotic systems equipped with vacuum grippers must reliably grasp a diverse range of objects from densely packed shelves. However, these environments present significant challenges, including occlusions, diverse object ori- entations, stacked and obstructed items, and surfaces that are difficult to suction. We introduce TetraGrip, a novel vacuum- based grasping strategy featuring four suction cups mounted on linear actuators. Each actuator is equipped with an optical time- of-flight (ToF) proximity sensor, enabling reactive grasping.
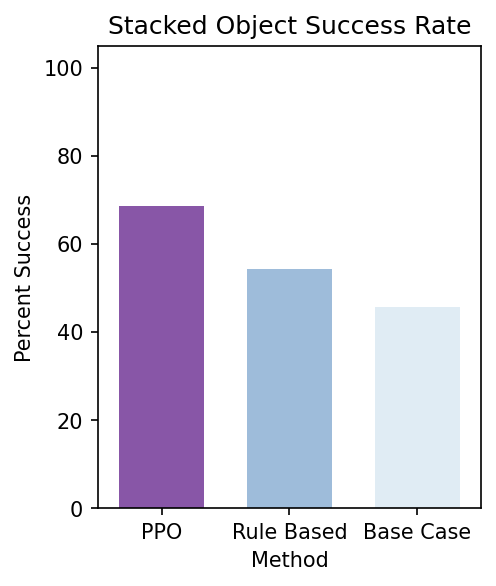
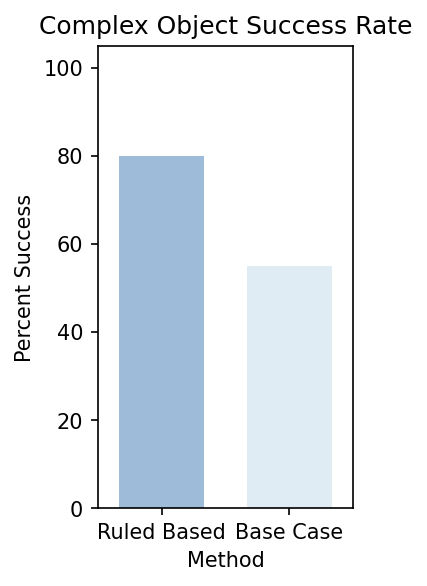
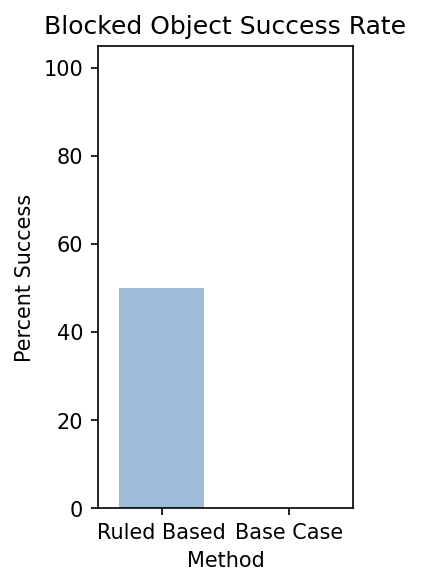
We evaluate TetraGrip in a warehouse-style setting, demon- strating its ability to manipulate objects in stacked and ob- structed configurations. Our results show that reinforcement learning (RL) strategies improve picking success in stacked- object scenarios by 22.86% compared to a single-suction grip- per. Additionally, we demonstrate that TetraGrip can success- fully grasp objects in scenarios where a single-suction gripper fails due to physical limitations, specifically in two cases: (1) picking an object occluded by another object and (2) retrieving an object in a complex scenario. These findings highlight the advantages of multi-actuated, suction-based grasping in unstructured warehouse environments.
Fabrication
The gripper is designed to be lightweight, compact, and easy to integrate into existing robotic systems. It consists of four suction cups mounted on a rigid frame, with each cup connected to a linear actuator that allows for precise positioning and control. The body is 3D printed using a durable and lightweight material, ABS, to ensure strength and reliability. It is powered by a Jetson Nano Orin and fit with VL53L5CX ToF sensors for real-time sensor feedback.
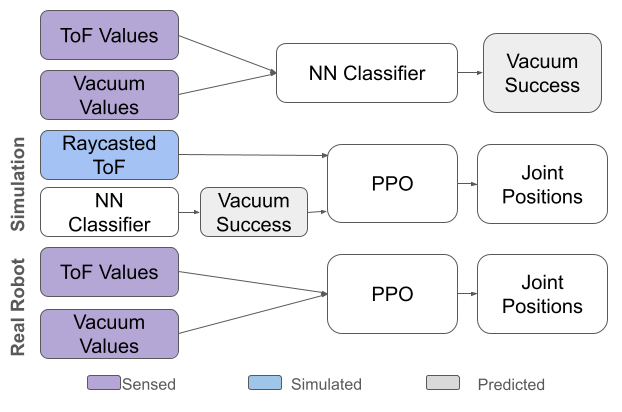
System Architecture
Our RL pipeline involves training a neural network classifier that processes proximity sensor and vacuum readings to predict whether suction is occurring. We train an RNN-LSTM PPO policy in simulation using a multi-modal observation space. This policy is then deployed in a real-world scenario, where its actions are executed via a PD controller.
Experimental Results
Tetragrip showed a 22.86% improvement in picking success in stacked-object scenarios compared to a single-suction gripper. It also demonstrated the ability to successfully grasp objects in scenarios where a single-suction gripper fails due to physical limitations, specifically in two cases: (1) retrieving objects with complex geometries and (2) picking an object occluded by another object.